Research
Pro-active Human-Mobile Robot Interaction
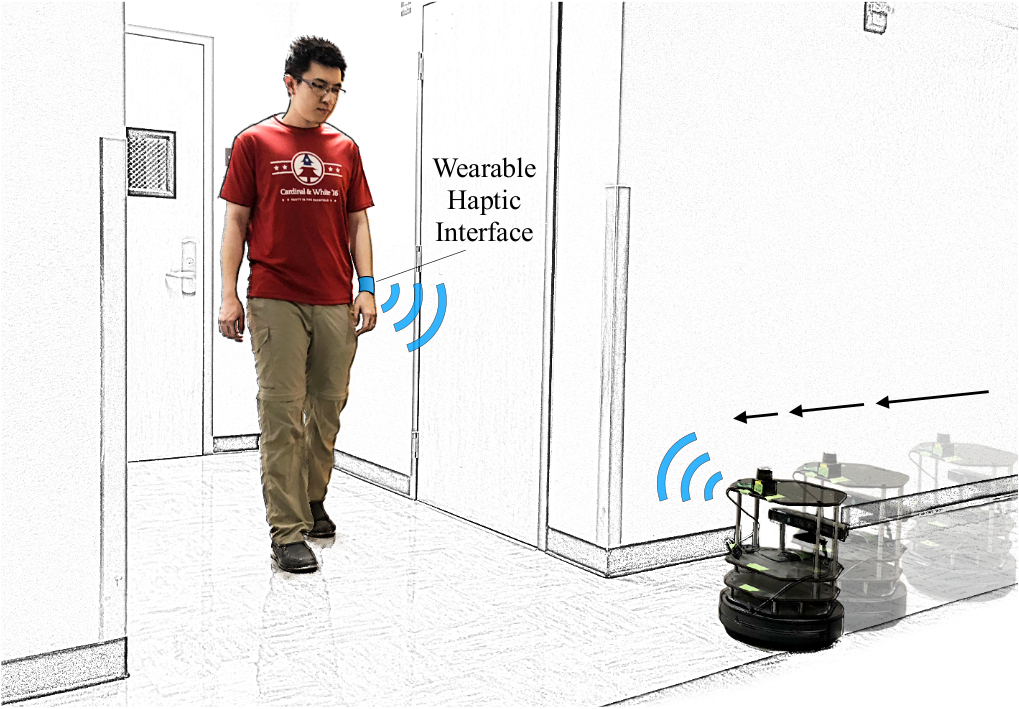
In order to function seamlessly in human environment, robots need to interact and communication with people. My thesis aims to enable robots to pro-actively communicate with users to improve efficiency and performance. I’m interested in designing new interaction schemes with wearable technologies (haptics, AR/VR), as well as intelligent algorithms that predict human behaviors and generate optimal plans. Learn more
Surgical Robot Automation & Control
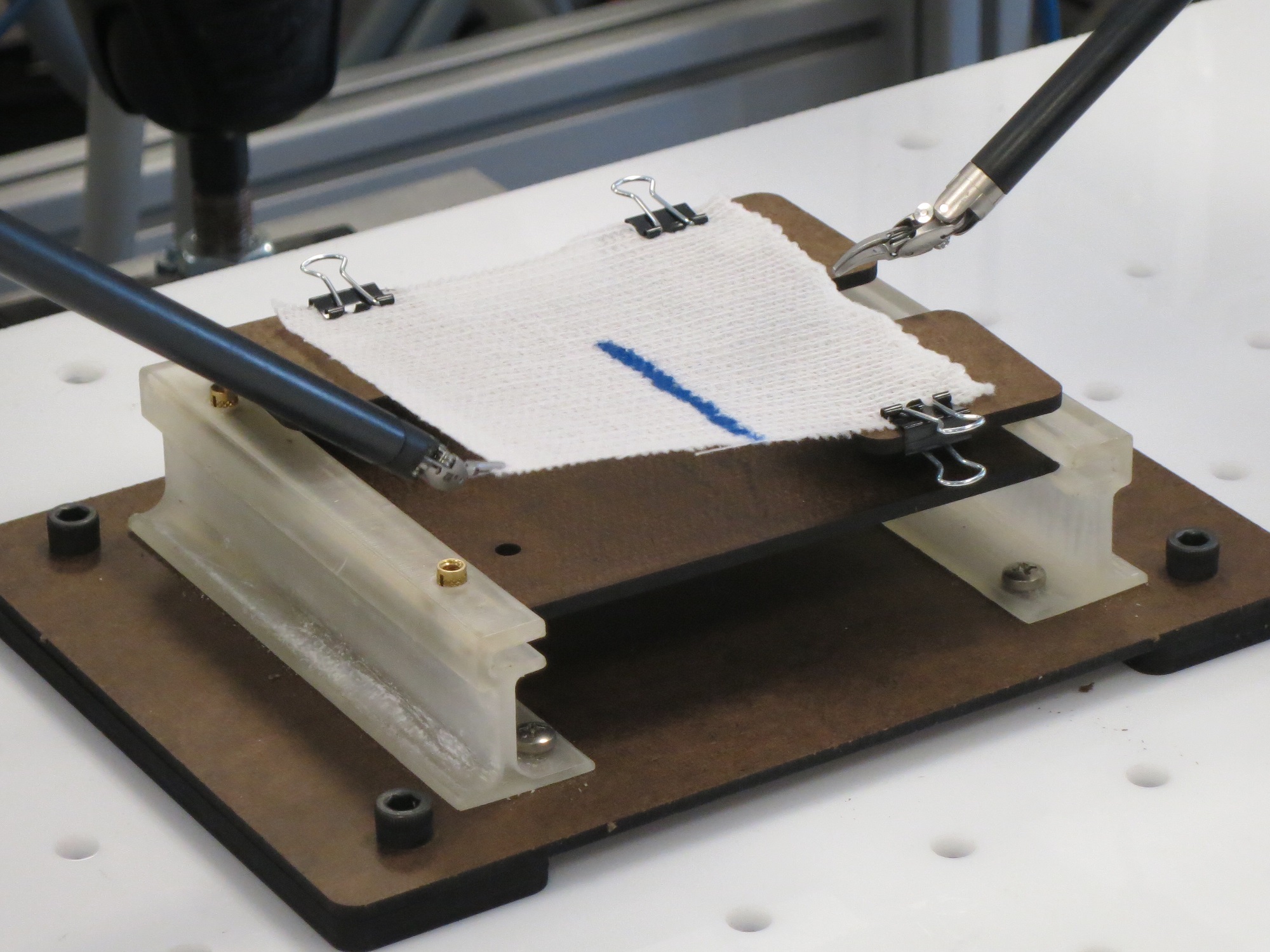
More than half a million abdominal, gynecologic, urologic and cardiac surgeries are performed minimally invasivelly with surgical robots. Current surgical robotics systems are fully teleoperated. Full or partial automation of some repetitive tasks like palpating and suturing has the potential to reduce surgeon errors, duration of procedures, trauma and expense. I have worked on partial automation and shared-control of surgical sub-tasks in a multilateral setting. Learn more